Fréquence et capacité des lignes.
Sur une ligne de métro la fréquence des trains et donc la capacité de la ligne est dimensionnée par deux facteurs : l´intervalle de sécurité entre deux rames qui détermine la vitesse maximale des trains et la durée des manoeuvres de terminus.
Calcul de l´intervalle minimal de sécurité:
Dans tout l´article nous n´étudierons que les métros actuels qui possèdent tous un
pilotage automatique donc un système de contrôle de la vitesse et de calcul de la vitesse limite actif même en pilotage manuel.
La conduite d´un train comme la conduite de tout véhicule doit se faire en respectant
certaines consignes de vitesse. La vitesse du véhicule roulant doit être ajustée pour
éviter tout risque de déraillement ou de sortie de voie et tout risque de rattrapage
du train suivant. Pour éviter le premier danger le conducteur ou le système de pilotage
doit ajuster la vitesse à la configuration de la voie ainsi qu´aux caractéristiques de la rame.
Cette vitesse limite de circulation ne dépend pas de la signalisation ni des trains précédents.
En revanche pour éviter tout risque de rattrapage il faut ajuster la vitesse de circulation en fonction
de la position et éventuellement de la vitesse du train de devant.
Il existe plusieurs modes d´exploitation des voies qui diffèrent dans la façon de
déterminer l´intervalle minimal de sécurité entre les trains ce qui influence le calcul
de la consigne de vitesse donnée au conducteur ou au système de pilotage. En réalité le calcul de
la vitesse du véhicule se fait en une fois intuitivement par le conducteur ou à l´aide d´un logiciel
en tenant compte de la géométrie de la voie, des caractéristiques du matériel roulant, du temps de réaction
des différents système de régulation et de la position du train de devant.
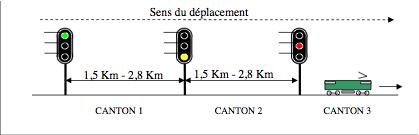
-> 1ère méthode : le canton fixe:
Le découpage des voies en cantons fixes est le premier mode d´exploitation des voies utilisé. Un canton est un segment de voie ferrée délimité par des bornes et possédant une signalisation propre en entrée. A chaque canton est associé un circuit électrique indépendant, le circuit de voie, en faisant circuler un courant dans les rails (circuit vert) et en mesurant l´impédance de ce circuit on peut détecter la présence ou non d´un train dans le canton. En effet la présence du train va modifier l´impédance du circuit électrique.

On remarque sur le schéma que le signal d´entrée devient rouge quand le canton est occupé par un train. Le canton précédent sera lui aussi fermé à la circulation. Le règle en vigueur sur le réseau ferré français est de laisser un canton libre antre deux trains.
A l´origine la consigne de vitesse était envoyée au train, cette consigne avait été établie au préalable pour
que le train puisse s´arrêter au feu jaune en cas de freinage d´urgence. Actuellement la vitesse limite du train est
calculée en permanence par l´ordinateur de bord pour qu´en cas de freinage d´urgence le train puisse s´arrêter au niveau
du signal jaune. Ce calcul tient compte de la capacité du train à freiner, de la géométrie de la voie à cet endroit, des caractéristiques du convoi.
Un certaine marge de sécurité est conservée pour tenir compte de la météo ou de l´usure des rails et des roues qui risquent d´augmenter la distance de freinage.
On remarque rapidement que l´intervalle minimal entre deux trains est déterminé par la taille du canton tampon et que ce système d´exploitation est loin d´être optimal.
Actuellement toutes les lignes du métro parisien à l´exception de la ligne 14 sont exploitées avec le système de cantons fixes.
Ce système permet d´atteindre un intervalle minimal de 105 secondes entre deux rames.
-> 2ème méthode : le canton virtuel:
Le second mode d´exploitation n´a pu être développé que grâce aux progrès de l´informatique.
Le cantonnement au sol est remplacé par un cantonnement virtuel, une voie virtuelle est implémentée dans l´ordinateur de bord.
La signalisation au sol est remplacée par une signalisation embarquée. Chaque train est équipé d´un système de mesure de vitesse par rapport à des bornes fixes.
Cette vitesse permet, en l´intégrant, de retrouver la position du train sur la voie virtuelle et donc dans le cantonnement virtuel.
Cette absence de marquage au sol et de signalisation fixe autorise un découpage plus fin de la voie sans surcoût.
Le canton tampon est plus court, l´intervalle minimale de sécurité en est diminué d´autant.
Ce mode d´exploitation est utilisé sur la ligne 14 et sur la ligne A du RER.
Le système Ouragan d´aide à la conduite des trains prévu sur la ligne 13 ainsi que les trains automatiques de la ligne 1 fonctionnent avec un système de cantons virtuels.
Le second avantage d´un tel mode d´exploitation est le contrôle continu de vitesse.
Ce contrôle nécessaire pour trouver la position du train peut aussi servir pour assurer la sécurité en contrôlant en permanence la vitesse du
véhicule et en évitant ainsi tout risque de dépassement. Pour éviter toute erreur de position des bornes fixes sur les voies permettent de vérifier
que la position réelle concorde avec la position virtuelle calculée par l´ordinateur de bord. Avant chaque borne le système de contrôle envoie un
signal vers la borne de position. Si le signal est renvoyé le train poursuit sa marche, sinon il avance jusqu´à la borne suivante et répète la même opération.
Si le signal est renvoyé normalement cela signifie que la borne précédente est détériorée, un signal est alors envoyé à la maintenance.
Dans le cas contraire le train s´arrête, son système de positionnement est défaillant. Avec un tel système l´intervalle entre deux trains peut descendre à 85 secondes.
-> 3ème méthode : le canton mobile déformable.
Avec ce dernier système d´exploitation, l´intervalle de sécurité entre deux train est calculé pour que le train s´arrête exactement à l´arrière du train précédent. Chaque train se localise en intégrant sa vitesse et en s´étalonnant par rapport au sol, il transmet sa position au centre de calcul qui lui renvoie un but (obstacle, train précédent). Le système de calcul du train ajuste la vitesse pour s´arrêter avant l´obstacle. On qualifie ce système de système à canton mobile mais, en réalité, les cantons ont totalement disparus. L´intervalle est calculé directement par rapport à la position du train précédent. Ce système a été développé au Etats-Unis, il est utilisé sur le métro automatique de Lyon.
Les manoeuvres de terminus.
En arrivant dans un terminus les rames de métro doivent être retournées pour retourner sur la ligne en sens inverse.
Le temps nécessaire à ces manoeuvres de retournement limite la fréquence des trains sur la ligne.
Sans aide informatique le pilote doit avancer les train dans le tiroir de bout de voie, descendre du train, marcher jusqu´à
l´autre bout de la rame et repartir en avant dans la voie opposée. Pendant ce temps aucun train ne démarre du terminus.
L´automatisation des manoeuvres de retournement en bout de lignes constitue la manière la moins couteuse d´améliorer la
fréquence des rames.
Si les contraintes en terme de capacité ne sont pas trop fortes, on peut même se limiter à une telle
amélioration. Ces projets sont peu couteux car il y a assez peu de contraintes techniques et de problèmes de sécurité : la
signalisation est simple, il n´y a pas de voyageurs sur les voies de retournement et les vitesses des trains sont faibles.
En attendant l´arrivée du système d´aide à la conduite Ouragan sur la ligne 13, la RATP a d´ors et déjà automatisé les manoeuvres
de terminus à Châtillon. Le conducteur demeure dans le train pour contrôler le bon déroulement de l´opération mais une simple pression
permet d´effectuer l´intégralité de la manoeuvre. Lorsque le train est de nouveau à quai il quitte le train et un autre conducteur monte
à l´avant. Le gain de temps est considérable. Un dispositif similaire est prévu sur la ligne 5.